The detector of 2D scene performing a 'complete detection'. More...
#include <ODDetector.h>
Public Member Functions | |
| ODDetector2DComplete (std::string const &trained_data_location_) | |
| virtual ODDetections * | detect (ODSceneImage *scene)=0 |
| Function for performing detection on a segmented scene. More... | |
| virtual ODDetections3D * | detectOmni (ODSceneImage *scene)=0 |
| Function for performing detection on an entire scene. More... | |
 Public Member Functions inherited from od::ODDetector Public Member Functions inherited from od::ODDetector | |
| ODDetector (std::string const &training_data_location_) | |
| virtual ODDetections * | detect (ODScene *scene) |
| virtual ODDetections * | detectOmni (ODScene *scene) |
| Public Member Functions inherited from od::ODDetectorCommon | |
| ODDetectorCommon (std::string const &trained_data_location_="") | |
| virtual void | init ()=0 |
| std::string | getTrainingInputLocation () const |
| Gets/Sets the directory containing the data for training. More... | |
| void | setTrainingInputLocation (std::string training_input_location_) |
| Gets/Sets the directory containing the data for training. More... | |
| std::string | getTrainedDataLocation () const |
| Gets/Sets the base directory for trained data. More... | |
| virtual void | setTrainedDataLocation (std::string trained_data_location_) |
| The base directory for trained data. More... | |
| std::string | getSpecificTrainingDataLocation () |
| Gets the specific directory for a Trainer or a Detector inside trained_data_location_. More... | |
| std::string | getSpecificTrainingData () |
| std::string const & | getTrainedDataID () const |
| void | setTrainedDataID (std::string const &trainedDataID) |
Additional Inherited Members | |
| Public Attributes inherited from od::ODDetector | |
| bool | metainfo_ |
| Protected Attributes inherited from od::ODDetectorCommon | |
| std::string | training_input_location_ |
| std::string | trained_data_location_ |
| std::string | TRAINED_DATA_ID_ |
| std::string | TRAINED_LOCATION_DENTIFIER_ |
Detailed Description
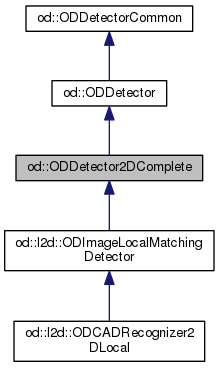
The detector of 2D scene performing a 'complete detection'.
This class takes a 2D scene (ODSceneImage) as input and performs complete detection on them. That is, other than finding the bounding box or location of the object in the image it finds out the 3D location and orientation (in other words translation and rotation) of the object in the actual 3D scene as well.
Definition at line 135 of file ODDetector.h.
Constructor & Destructor Documentation
|
inline |
Definition at line 138 of file ODDetector.h.
Member Function Documentation
|
pure virtual |
Function for performing detection on a segmented scene.
The purpose of this function is to perform detection on a segmented scene or an 'object candidate'. i.e. the entire scene is considered as an 'object' or an detection. It is possible for a scene to trigger multiple detections.
- Parameters
-
[in] scene An instance of 2D scene
- Returns
- A number of detections as an ODDetections instance.
Implemented in od::l2d::ODCADRecognizer2DLocal.
|
pure virtual |
Function for performing detection on an entire scene.
The purpose of this function is to detect an object in an entire scene. Thus, other than the type of detection we also have information about the location of the detection w.r.t. the scene.
- Parameters
-
[in] scene An instance of 2D scene
- Returns
- A number of detections as an ODDetections3D instance containing information about the detection and its pose in 3D.
Implemented in od::l2d::ODCADRecognizer2DLocal.
The documentation for this class was generated from the following file:
- /home/sarkar/opendetection/common/pipeline/ODDetector.h