od::ODDetectionComplete Class Reference
Detection in 2D with complete information. More...
#include <ODDetection.h>
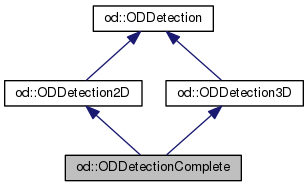
Inheritance diagram for od::ODDetectionComplete:
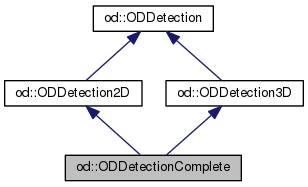
Collaboration diagram for od::ODDetectionComplete:
Additional Inherited Members | |
 Public Member Functions inherited from od::ODDetection2D Public Member Functions inherited from od::ODDetection2D | |
| virtual | ~ODDetection2D () |
| ODDetection2D (DetectionType const &type_=OD_DETECTION_NULL, std::string const &id_="", double confidence_=1) | |
| Eigen::Vector3d const & | getLocation () const |
| void | setLocation (Eigen::Vector3d const &location_) |
| cv::Rect const & | getBoundingBox () const |
| void | setBoundingBox (cv::Rect const &bounding_box_) |
| cv::Mat const & | getMetainfoImage () const |
| void | setMetainfoImage (cv::Mat const &metainfo_image_) |
| Public Member Functions inherited from od::ODDetection | |
| OD_DEFINE_ENUM_WITH_STRING_CONVERSIONS (DetectionType,(OD_DETECTION_RECOG)(OD_DETECTION_CLASS)(OD_DETECTION_NULL)) virtual ~ODDetection() | |
| ODDetection (DetectionType const &type_=OD_DETECTION_NULL, std::string const &id_="", double confidence_=1) | |
| void | printSelf () |
| DetectionType const & | getType () const |
| void | setType (DetectionType const &type_) |
| std::string const & | getId () const |
| void | setId (std::string const &id_) |
| double | getConfidence () const |
| Get/Set the confidence of the detection. More... | |
| void | setConfidence (double confidence_) |
| Get/Set the confidence of the detection. More... | |
| Public Member Functions inherited from od::ODDetection3D | |
| virtual | ~ODDetection3D () |
| Eigen::Vector4d const & | getLocation () const |
| void | setLocation (Eigen::Vector4d const &location_) |
| void | setLocation (cv::Mat const &location_) |
| Eigen::Matrix3Xd const & | getPose () const |
| void | setPose (Eigen::Matrix3Xd const &pose_) |
| void | setPose (cv::Mat const &pose_cv) |
| double | getScale () const |
| void | setScale (double scale) |
| cv::Mat const & | getMetainfoImage () const |
| void | setMetainfoImage (cv::Mat const &metainfo_image) |
| pcl::PointCloud< pcl::PointXYZ > ::Ptr const & | getMetainfoCluster () const |
| void | setMetainfoCluster (typename pcl::PointCloud< pcl::PointXYZ >::Ptr const &metainfo_cluster_) |
| ODDetection3D (DetectionType const &type_=OD_DETECTION_NULL, std::string const &id_="", double confidence_=1) | |
| void | printSelf () |
| Public Attributes inherited from od::ODDetection2D | |
| Eigen::Vector3d | location_2d_ |
| cv::Rect | bounding_box_2d_ |
| cv::Mat | metainfo_image_ |
| Public Attributes inherited from od::ODDetection3D | |
| Eigen::Vector4d | location_3d_ |
| Eigen::Matrix3Xd | orientation_ |
| double | scale_ |
| cv::Mat | metainfo_image_ |
| pcl::PointCloud< pcl::PointXYZ > ::Ptr | metainfo_cluster_ |
Detailed Description
Detection in 2D with complete information.
Definition at line 266 of file ODDetection.h.
The documentation for this class was generated from the following file:
- /home/sarkar/opendetection/common/pipeline/ODDetection.h