Detector based on 3D global features like VFH, ESF, CVFH etc. More...
#include <ODCADDetector3DGlobal.h>
Public Member Functions | |
| ODCADDetector3DGlobal (std::string const &training_data_location="", std::string const &training_input_location="") | |
| void | init () |
| ODDetections * | detect (ODScenePointCloud< PointT > *scene) |
| Function for performing detection on a segmented scene. More... | |
| ODDetections3D * | detectOmni (ODScenePointCloud< PointT > *scene) |
| Function for performing detection on an entire scene. More... | |
| int | getNN () const |
| void | setNN (int NN) |
| std::string const & | getDescName () const |
| void | setDescName (std::string const &desc_name) |
 Public Member Functions inherited from od::ODDetector3D< PointT > Public Member Functions inherited from od::ODDetector3D< PointT > | |
| ODDetector3D (std::string const &trained_data_location_) | |
| Public Member Functions inherited from od::ODDetector | |
| ODDetector (std::string const &training_data_location_) | |
| virtual ODDetections * | detect (ODScene *scene) |
| virtual ODDetections * | detectOmni (ODScene *scene) |
| Public Member Functions inherited from od::ODDetectorCommon | |
| ODDetectorCommon (std::string const &trained_data_location_="") | |
| std::string | getTrainingInputLocation () const |
| Gets/Sets the directory containing the data for training. More... | |
| void | setTrainingInputLocation (std::string training_input_location_) |
| Gets/Sets the directory containing the data for training. More... | |
| std::string | getTrainedDataLocation () const |
| Gets/Sets the base directory for trained data. More... | |
| virtual void | setTrainedDataLocation (std::string trained_data_location_) |
| The base directory for trained data. More... | |
| std::string | getSpecificTrainingDataLocation () |
| Gets the specific directory for a Trainer or a Detector inside trained_data_location_. More... | |
| std::string | getSpecificTrainingData () |
| std::string const & | getTrainedDataID () const |
| void | setTrainedDataID (std::string const &trainedDataID) |
Protected Attributes | |
| int | NN |
| std::string | desc_name |
| boost::shared_ptr < pcl::rec_3d_framework::GlobalClassifier < pcl::PointXYZ > > | global_ |
| Protected Attributes inherited from od::ODDetectorCommon | |
| std::string | training_input_location_ |
| std::string | trained_data_location_ |
| std::string | TRAINED_DATA_ID_ |
| std::string | TRAINED_LOCATION_DENTIFIER_ |
Additional Inherited Members | |
| Public Attributes inherited from od::ODDetector | |
| bool | metainfo_ |
Detailed Description
template<typename PointT = pcl::PointXYZRGBA>
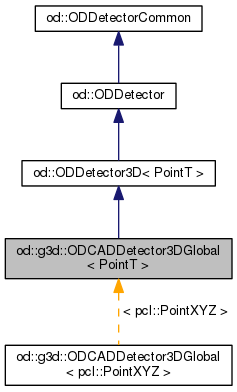
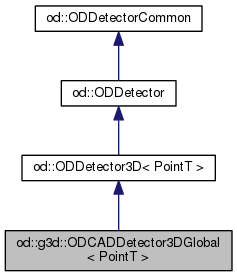
class od::g3d::ODCADDetector3DGlobal< PointT >
Detector based on 3D global features like VFH, ESF, CVFH etc.
This class uses PCL 3d_recognition_framework in the background for the detection. First train your data using ODCADDetectTrainer3DGlobal and use this class for the detection. This detection will assume the presence of a plane (like a table top) in the pointcloud. It segments the point cloud assuming the presence of a plane and using a simple Euclidian segmentation. After that it finds the global features of each segmented scene match them with the trained data thereby performing a clssification. Read the documentation of ODCADDetectTrainer3DGlobal to know how the training data should be arranged and trained to get meaningful detection.
This class provides a detection for each segmented scenes which matches them the best. So the number of positive detection is same as the number of possible segmented scene in the point cloud.
Definition at line 67 of file ODCADDetector3DGlobal.h.
Constructor & Destructor Documentation
|
inline |
Definition at line 71 of file ODCADDetector3DGlobal.h.
Member Function Documentation
|
virtual |
Function for performing detection on a segmented scene.
The purpose of this function is to perform detection on a segmented scene or an 'object candidate'. i.e. the entire scene is considered as an 'object' or an detection. It is possible for a scene to trigger multiple detections.
- Parameters
-
[in] scene An instance of 3D scene
- Returns
- A number of detections as an ODDetections instance.
Implements od::ODDetector3D< PointT >.
Definition at line 165 of file ODCADDetector3DGlobal.hpp.
References od::ODScenePointCloud< PointType >::getPointCloud(), and od::ODDetections::push_back().
|
virtual |
Function for performing detection on an entire scene.
The purpose of this function is to detect an object in an entire scene. Thus, other than the type of detection we also have information about the location of the detection w.r.t. the scene.
- Parameters
-
[in] scene An instance of 3D scene
- Returns
- A number of detections as an ODDetections3D instance containing information about the detection and its 3D pose.
Implements od::ODDetector3D< PointT >.
Definition at line 99 of file ODCADDetector3DGlobal.hpp.
References od::ODScenePointCloud< PointType >::getPointCloud(), od::ODDetections::push_back(), od::ODDetection::setId(), od::ODDetection3D::setLocation(), od::ODDetection3D::setMetainfoCluster(), and od::ODDetection::setType().
|
inline |
Definition at line 94 of file ODCADDetector3DGlobal.h.
|
inline |
Definition at line 84 of file ODCADDetector3DGlobal.h.
|
virtual |
Implements od::ODDetectorCommon.
Definition at line 15 of file ODCADDetector3DGlobal.hpp.
|
inline |
Definition at line 99 of file ODCADDetector3DGlobal.h.
|
inline |
Definition at line 89 of file ODCADDetector3DGlobal.h.
Member Data Documentation
|
protected |
Definition at line 106 of file ODCADDetector3DGlobal.h.
Referenced by od::g3d::ODCADDetector3DGlobal< pcl::PointXYZ >::getDescName(), and od::g3d::ODCADDetector3DGlobal< pcl::PointXYZ >::setDescName().
|
protected |
Definition at line 107 of file ODCADDetector3DGlobal.h.
|
protected |
Definition at line 105 of file ODCADDetector3DGlobal.h.
Referenced by od::g3d::ODCADDetector3DGlobal< pcl::PointXYZ >::getNN(), and od::g3d::ODCADDetector3DGlobal< pcl::PointXYZ >::setNN().
The documentation for this class was generated from the following files:
- /home/sarkar/opendetection/detectors/global3D/detection/ODCADDetector3DGlobal.h
- /home/sarkar/opendetection/detectors/global3D/detection/ODCADDetector3DGlobal.hpp